Introduction
Two bone IK is always used for arm IK solve. That is to say, the triangle Hand-Elbow-Arm is solved using Law of Cosines.
The hand bone of our character is always located, however, at position of the wrist of character mesh like this:
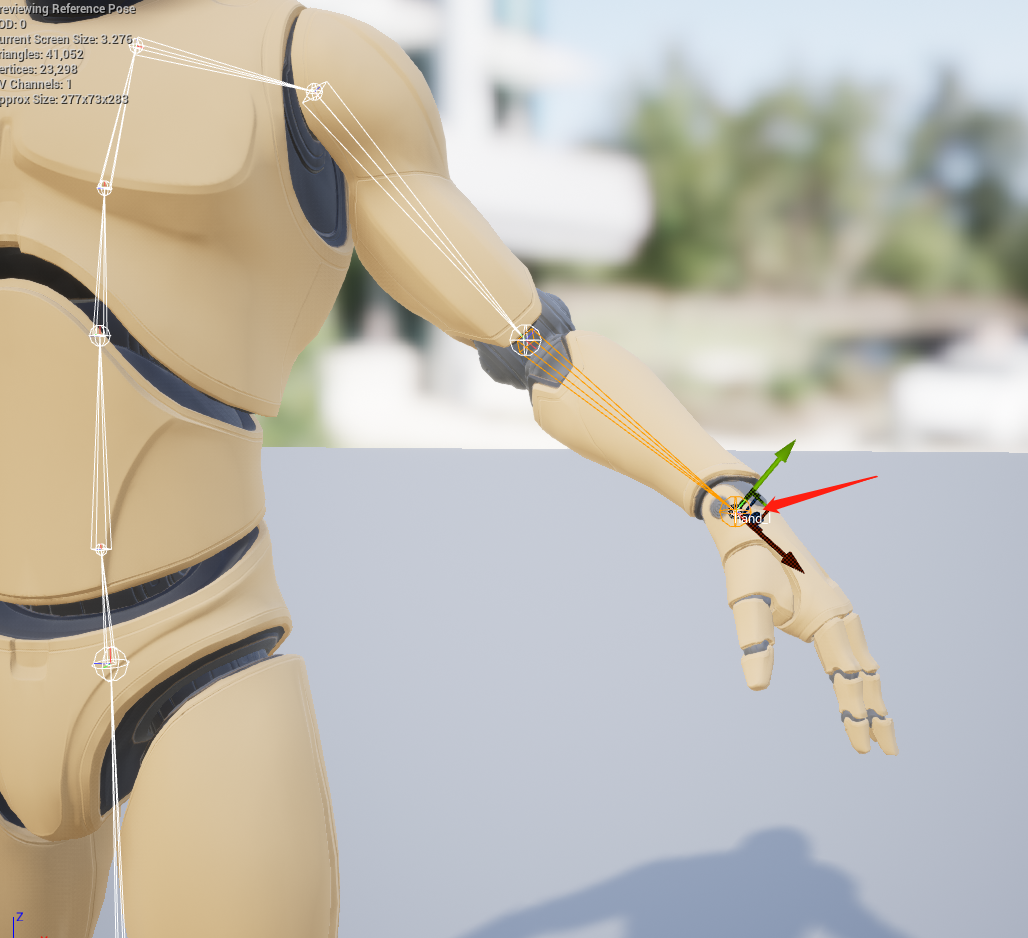
But we don’t directly place this bone to the Left Hand Target socket of the weapon mesh, or else:
The palm bone of left hand should be constrainted to Left Hand Target of the weapon mesh. So, we need to solve Arm-Elbow-Hand-Palm chain.
As a result, default Two Bone IK node cannot meet our requirement. We need our own anim node.
Why doesn’t Two bone IK work?
We need a valid location of Left Hand Bone calculated by:
which is the matrix of palm target, and $M_{LeftPalm}^{-1}$ is the inverse of the local transform of Left Palm bone.
Of course we can calculate $M_{LeftPalm}^{-1}$ in the Event Graph or somewhere else. But this is the local transform from previous frame, which might be different of that in current frame.
In short, we need to get this inverse matrix when this AnimInstance get evaluated. To achieve that, I simply created a new anim node.
Key Logic
The implementation is truly easy because we just need to apply a inversed transform to the Effector before a AnimationCore::SolveTwoBoneIK is called.
Thus we just need to get the socket or bone local transform, and apply its inversed value to the current EffectorTransform.
1 | EffectorTransform = holdingPointLocalTransform.Inverse() * EffectorTransform; |
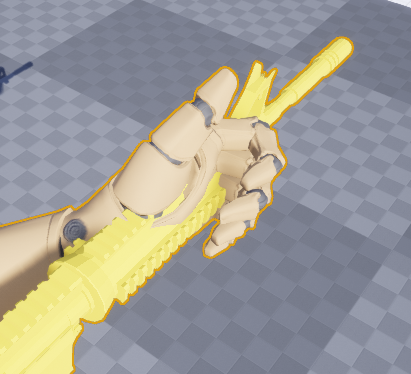
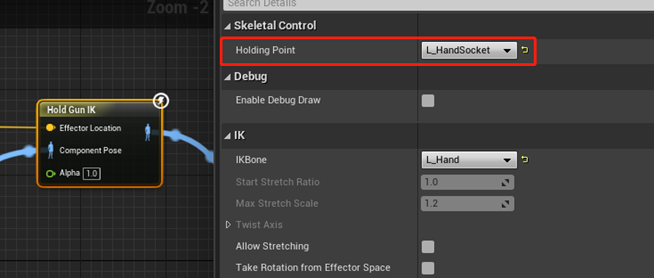
We can set the palm bone or socket for this node like this:
And this is what we eventually have: